THE SPHERICAL COORDINATE SYSTEM
The spherical coordinate system is a curvilinear orthogonal coordinate system. Fig. 1↓ illustrates the spherical unit vectors, er, eφ, and eθ in the Cartesian frame (x, y, z).
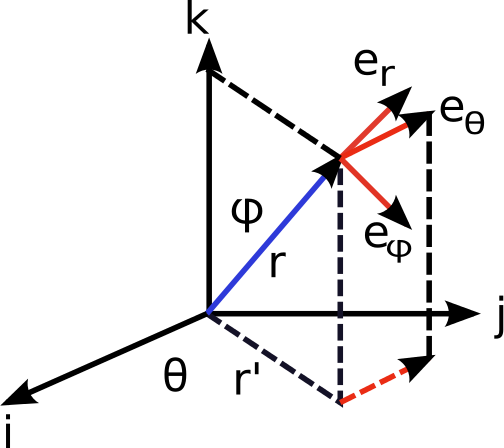
Fro the geometry, one can write spherical unit vectors as a function of i, j and k.
(1) er = sinφcosθi + sinφsinθj + cosφk
(2) eφ = cosφcosθi + cosφsinθj − sinφk
(3) eθ = − sinθi + cosθj
Since i, j and k are constant in time, the time derivatives of er, eφ, and eθ can be determined using eqs. 1↑ — 3↑:
(4) eṙ = φ̇cosφcosθi − θ̇sinφsinθi + φ̇cosφsinθj + θ̇sinφcosθj − φ̇sinφk
Regrouping all the underlined and double underlined terms in eq. 4↑ using eqs. 2↑ and 3↑, eṙ can be simplified to
(5) eṙ = φ̇eφ + θ̇sinφeθ
(6) eφ̇ = − φ̇sinφcosθi − θ̇cosφsinθi − φ̇sinφsinθj − φ̇cosφk
Similarly eφ̇ can be simplified from the underlined and double underlined terms in eq. 6↑, using eqns. 1↑ and 3↑:
(7) eφ̇ = − φ̇er + θ̇cosφeθ
(8) eθ̇ = − θ̇cosθi − θ̇sinθj
Using the equality sin2α + cos2α = 1, the equation becomes
(9) eθ̇ = − θ̇(sin2φ + cos2φ)cosθi − θ̇(sin2φ + cos2φ)sinθj
With eqs. 1↑ and 2↑, eθ̇ simplifies to
(10) eθ̇ = − θ̇(sinφer + cosφeφ)
(11) P = rer
Next Page →
Next Page →