 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
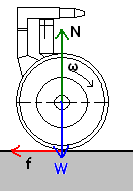
For each wheel, friction force is f and there are 16 wheels. Force balance on the entire aircraft leads to the following equation
(1) F − 16f = Ma
-
(2) fr = Iα = I(a)/(r)⇒ f = (Ia)/(r2)⇒ F − (16Ia)/(r2) = MaThus, initial linear acceleration of the aircraft is given by(3) a = (F)/(M + (16I)/(r2))
-
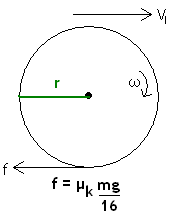
- Just after the touchdown, the translational velocity of the wheels is more than that of the rolling velocity. Thus the wheels slip (Vl > ωr). This phase is depicted in Figure 4.
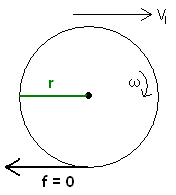
- In the rolling phase, when the wheels are undergoing pure rolling motion, the velocity of the wheels is given by Vl = ωr. The angular velocity ω of the wheels is constant in this phase, since there is no frictional force acting to reduce it. This phase of pure rolling is depicted in Figure 5.
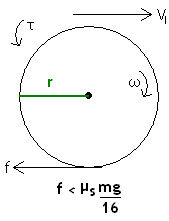
- When the brakes have been applied, the velocity of the wheels is still given by Vl = ωr. However the wheels undergo deceleration due to the applied torque and thus the angular velocity of the wheels (ω) is not a constant. The maximum frictional force acting is limited by the coefficient of static friction. The braking phase is depicted in Figure 6.
Next Page →
Next Page →
← Previous Page
← Previous Page