ANGULAR VELOCITY
Angular velocity is a vector quantity which is defined for a rigid body or a frame of reference. Let b1, b2 and b3 be three perpendicular unit vectors and form a right-handed frame of reference which is fixed on rigid body B moving in a reference frame A. Angular velocity of the body B is defined as
(1)
ωB ⁄ A = b1b2̇⋅b3 + b2b3̇⋅b1 + b3b1̇⋅b2
Using this definition, if β is a unit vector that is fixed in the rotating frame (or attached to the rigid body) B with respect to A, then the time derivation of β (β̇) is defined as
(2)
β̇ = ωB ⁄ A × β
2D OR PLANAR ANGULAR VELOCITY
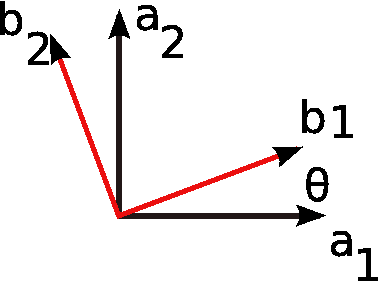
Let frame B (with unit vectors b1, b2 and b3) rotate with respect to frame A (with unit vectors a1, a2 and a3). Figure 1↓ shows a special case when B rotates about b3, which is also equal to a3 . (This is a rotation about an the axis normal to the page.) At any point in time, the unit vectors b are oriented at an angle θ with respect to the unit vectors a. The time rate of change of θ is the magnitude of angular velocity. The direction of angular velocity in this case is b3 = a3.
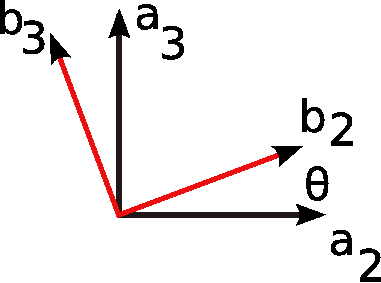
Similarly in the case shown in Fig. 2↓, angular velocity is
and in the case shown in Fig. 3↓, angular velocity is
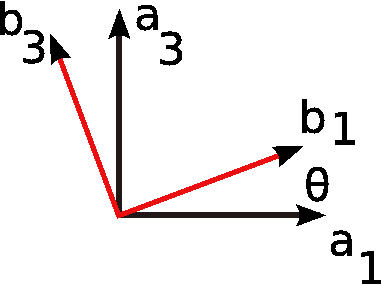
These cases are called simple rotation.