KINETIC ENERGY
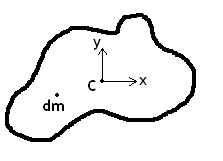
Kinetic energy is associated with the motion of a body or particle and relies on the velocity of the body. The definition of translational kinetic energy (KE) for a three-dimensional body moving in two dimensions (planar motion), as seen in Figure 1↑, is as follows:
The velocity vector V at an arbitrary point (x,y) is a combination of the velocity at point C and the velocity due to rotation about the z axis on point C. Thus, the velocity is defined as:
(2)
V
=
VC + ωk × (xi + yj)
=
VC + ω( − yi + xj)
where VC is the velocity vector at point C (the origin of the selected axes) and ωk is the angular velocity with respect to the z axis (i.e. the body is rotating in the x-y plane). The kinetic energy is a positive scalar value (not a vector) that is calculated using the dot product of velocity vectors.
Substituting this dot product into Equation 1↑ results into the following expression:
Since the following integrals are zero:
kinetic energy simplifies to the following equation:
This expression has a component relating to translational motion, (1 ⁄ 2)m(VC⋅VC), and another to rotational motion, (1 ⁄ 2)ICzzω2. Again, note that the kinetic energy is a scalar value, and has the units of a force times a distance, such as ft⋅lb or Joules (N⋅m).