 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
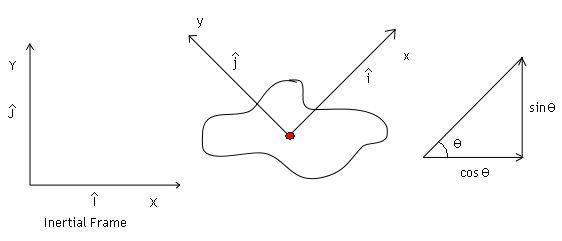
Thus unit vectors i and j are expressed in terms of unit vectors in the inertial reference frame, as
(14) i = cosθI + sinθJ
(15) i = − sinθI + cosθJ
Computing the derivatives of the unit vectors with time gives,
(16) (di)/(dt) = ( − sinθI + cosθJ)θ̇ = θ̇j = ωj
(17) (dj)/(dt) = ( − cosθI − sinθJ)θ̇ = − θ̇i = − ωi
Thus, moments about the center of mass can be expanded out as
(18)
ΣMc = Icxzω̇i + Icxzω(ωj)
+ Icyzω̇j + Icyzω( − ωi)
+ Iczzω̇k + Iczzω(0)
(19)
ΣMc = (Icxzα − Icyzω2) i
← Mcx
+ (Icyzα − Icyzω2) j
← Mcy
+ Iczzαk
← Mcz
If motion is restricted to a plane then, net force is also zero. Consider first the case where there are symmetric planar bodies.
(20)
Ixz = Iyz = 0
⇒ Mcx = Mcy = 0
The body’s motion is governed by:
This is clearly related to Euler’s equation with the moment of inertia replacing the mass. So for a 2D planar body (symmetric),
(22)
ΣFx = Σmẍc
ΣFy = Σmÿc
ΣMcz = Iczzθ̈
These equations are with respect to the inertial frame of reference.
← Previous Page
← Previous Page