 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
FLUTTER
Flutter is a dynamic instability that an aircraft may encounter due to an interaction of aerodynamic, inertial, and elastic forces. Lifting bodies such as wings, tails, and control surfaces may be subject to large aerodynamic loading resulting in flutter. A possible consequence of this phenomenon is structural failure. Therefore, all such lifting surfaces on any aircraft are subject to analysis and tests to ensure that flutter will not occur during the flight envelope. A special case of flutter, known as stall flutter, occurs on rotating lifting bodies such as in rotor blades or compressors caused by separation of the flow on the blades. Stall flutter makes the governing equations nonlinear.
Two-Degree-of-Freedom Flutter
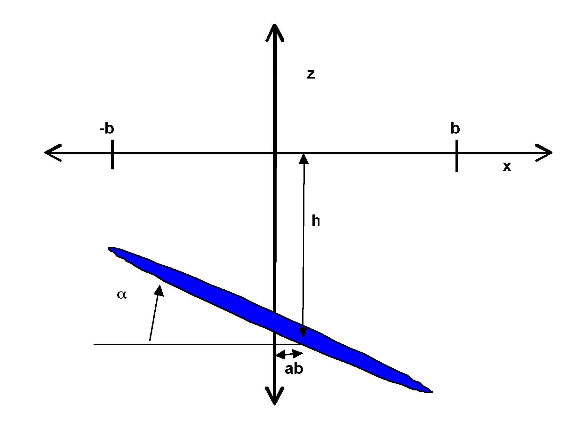
The equations of motion for this system are
(1)
m(ḧ + bxαα̈) + khh
= − L
IPα̈ + mbxα + kαα
= M
where IP is the moment of inertia about the point of pitching. Also, noting that M1 ⁄ 4 is the moment about the quarter chord,
Presuming that the motion is simple harmonic (h = heiωt and α = αeiωt), the lift and moment is
(3)
L
= Leiωt
M
= Meiωt
The airloads are assumed to be complex, linear functions of the amplitudes of motion
(4)
L
= − πρ∞b3ω2⎡⎣lh(k, M∞)(h)/(b) + lα(k, M∞)α⎤⎦
M
= πρ∞b4ω2⎡⎣mh(k, M∞)(h)/(b) + mα(k, M∞)α⎤⎦
where the reduced frequency is k = (bω)/(U) and M is the Mach number.
substituting the time-dependent functions into the equations of motion yields the following pair of equations for h and α
(5)
− ω2mh − ω2mbxαα + mω2hh
= − L
− ω2mbxαh − ω2IPα + IPω2αα
= M.
Combining the above expressions yields a pair of homogeneous relations for h and α
(6)
⎡⎣μ⎛⎝1 − ⎛⎝(ωh)/(ω)⎞⎠2⎞⎠ + lh⎤⎦(h)/(b) + (μxα + lα)α = 0
(μxα + mh)(h)/(b) + ⎡⎣μr2⎛⎝1 − ⎛⎝(ωα)/(ω)⎞⎠2⎞⎠ + mα⎤⎦α = 0
where
(7)
μ = (m)/(πρ∞b2)
r = √((IP)/(mb2)).
Next Page →
Next Page →