 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
VIRTUAL WORK EXAMPLE
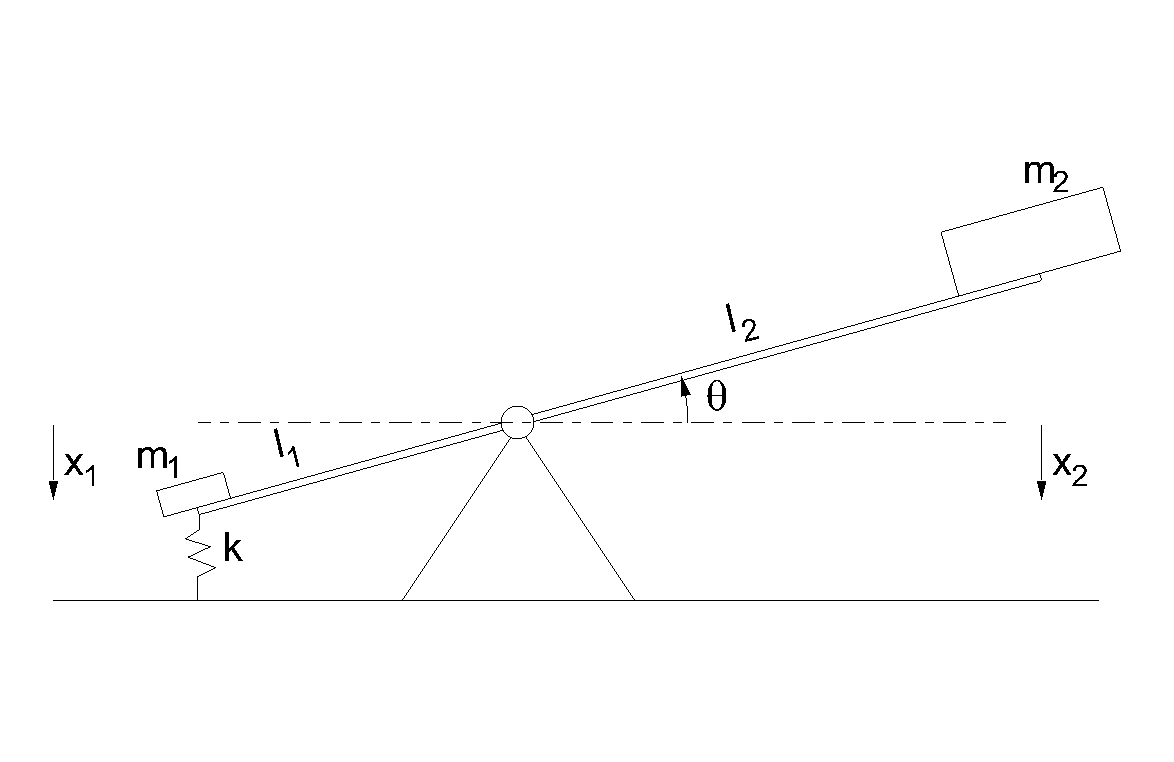
(1)
F1
= (m1g − kx1)î
F2
= m2gî
The positions of the masses m1 and m2 are
(2)
σ1
= x1î + y1ĵ
σ2
= x2î + y2ĵ
The virtual work done by the external forces is
(3)
δW
= 2⎲⎳i = 1 Fi⋅δσi
= (m1g − kx1)î⋅(δx1î + δy1ĵ) + m2gî⋅(δx2î + δy2ĵ)
= (m1g − kx1)δx1 + m2gδx2
At this point, the coordinates x1 and x2 are written in terms of the angle θ:
(4)
x1
= l1sinθ
x2
= − l2sinθ
The virtual displacement δθ is the variation of θ, so the virtual displacements δx1 and δx2 can be written in terms of δθ by taking the variation of Eq. ↓.
(5)
δx1
= l1cosθδθ
δx2
= − l2cosθδθ
Substituting these expressions into the virtual work, the result is
The principle of virtual work states that the virtual work done by all external forces in a system at equilibrium is zero, provided the virtual displacements are consistent with the constraints and that the constraint forces act perpendicular to the virtual displacements. Therefore, from the principle of virtual work, Eq. 6↑ becomes
or
However, since the virtual displacement δθ is arbitrary, the coefficient of δθ in Eq. 8↑ must vanish, so
After some algebra, the equilibrium value of θ is determined: