 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
INERTIA PROPERTIES
In terms of a three-dimensional body, the inertia properties refer to the nine components that make up the inertia matrix used in the calculation of angular momentum.
I = ⎡⎢⎢⎢⎣
Ixx
Ixy
Ixz
Iyx
Iyy
Iyz
Izx
Izy
Izz
⎤⎥⎥⎥⎦
Each property is dependent on the geometry and mass of the body and is either referred to as a moment of inertia (Ixx, Iyy, Izz) or a product of inertia (Ixy, Ixz, Iyx,Iyz, Izx, Izy).
To change the reference frame of the inertia properties, defined by x, y, and z, to a different axis system, denoted by x’, y’, and z’, recall the parallel axis theorem:
(1)
Ipxx = Icx’x’ + m(2 + 2)
Ipxy = Icx’y’ − m
where Ic refers to the inertia property about point c, Ip refers to a different point p, and , and , refer to the distances from point c to point p with respect to the axis defined for Ic.
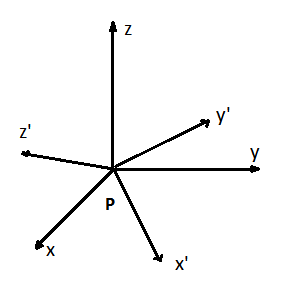
More specifically, the axes in the new reference frame can be related to the original reference frame through the angles between the the old and new azes. For instance, x’ can be defined as:
(2) x’ = (xi + yj + zk)⋅(lxi + lyj + lzk)
where the variables lx, ly, and lz are the direction cosines associated with the transform about x’. For instance, lx is equal to the cosine of the angle between x’ and x, and the same concept applies for ly and lz. The dot product between the interia matrix and the vector of the directional cosines, or I⋅(lxi + lyj + lzk), results in the following expression:
(3)
Ipx’x’ = l2xIPxx + l2yIPyy + l2zIPzz + 2(lxlyIPxy + lylzIPyz + lzlxIPzx)
For products of inertia, a similar equation can be used. Let ηx, ηy, and ηz be the direction cosines associated with the y’ axis. Given the definition of y’, similar to that of Equation 2↑:
(4) y’ = (xi + yj + zk)⋅(ηxi + ηyj + ηzk)
the inertial property Ipx’y’ can be calculated as:
(5) Ipx’y’ = lxηxIPxx + lyηyIPyy + lzηzIPzz + (lxηy + lyηx)IPxy + (lyηz + lzηy)IPyz + (lzηx + lxηz)IPzx
Therefore, if the inertial properties of the body in a fixed set of axes is known, then the inertial properties of P about any other axis system can be calculated.