 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
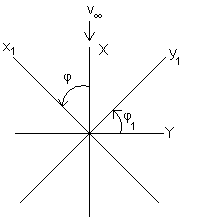
ORIENTATION OF A RIGID BODY
Eulerian angles:
![]() X,Y, Z and
X,Y, Z and ![]() are a fixed inertial frame.
are a fixed inertial frame.
![]() let x, y, z and i, j, k be fixed to the body such that it will move with the body.
let x, y, z and i, j, k be fixed to the body such that it will move with the body.
First motion:
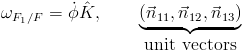
 Second motion:
Second motion:

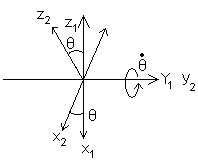
 Third motion:
Third motion:
![]()
For this to be useful, we need to operate in the same unit vector system.
![]()
![]()
![]()
Let us keep our notation short by denoting sin as S and cos as C.
![]()
As now,
![]()
This is the rotation w.r.t the moving body. We can do the same procedure and find the rotation w.r.t. the fixed (inertial) frame:
![]()
We can break up the rotation as:
![]()
![]()
We can use these to solve for the rotation of each
![]() ,
,
![]() ,
,
![]()
Next Page →
Next Page →