 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
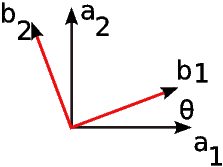
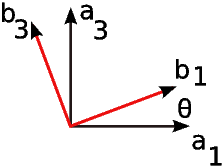
Planar rotation
Let frame B (with unit vectors b1, b2 and b3) rotates with respect to A frame (with unit vectors a1, a2 and a3). Figure 0.3 shows a special case when B rotates about b3 = a3 with angle θ with respect to A.
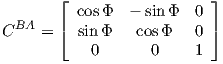 | (0.2) |
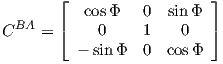
Similarly in the case shown in Fig. 0.4, direction cosine matrix is
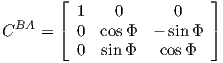 | (0.3) |
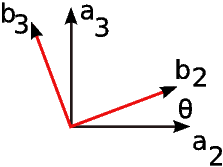
and in the case shown in Fig. 0.5, direction cosine matrix is
 | (0.4) |
Any of these cases are called simple rotation.
Next Page →
← Previous Page
← Previous Page
Next Page →