 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
Figure 0.10 two different frame of reference and one unique vector. In this example the black frame rotates to become blue frame. The red vector is physically the same vector and it is independent of frame of reference. One can decide to write the component of this vector in any frame and these components are related to each other through rotation matrix.
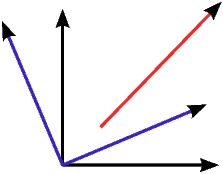
For example if a vector e can be written as e = α1a1 + α2a2 + α3a3 = β1b1 + β2b2 + β3b3. α1, α2 and α3 are the components of vector e in frame A. β1, β2 and β3 are the components of vector e in frame B. These componet are related to each other via direction cosine matrix.
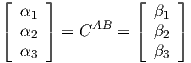 | (0.6) |
Notice that despite the fact that αi are not equal to βi, the vector e is one unique vector and shows the same physical phenomena. This concept is used often in dynamics.