 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
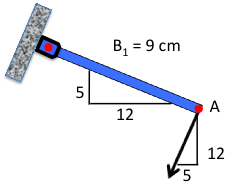
Information about bar one can also be extracted from Fig. 4↑, although it must be applied in a different manner. The direction of the velocity of point A can also be gleaned from the orientation of bar one and the rotation of bar three. This 5-12 triangle also provides some information about the length of the bar in the coordinate directions. The hypotenuse of a 5-12 cm triangle is 13 cm, while the bar length is only 9 cm. The length of the bar in the two coordinate directions can be computed by multiplying the length of the bar (9 cm) by the fractional lengths (i.e., 12/13 i and 5/13 j). Multiplying this out results in lengths of (8.31 i cm and 3.26 j cm)
Armed with this information, the system behavior can be computed. Since the angular velocity of bar three is known, the velocity at point B can be computed. The velocity at the pivot (let it be point O) is equal to zero since it has no translation.
VB + ω3 × rBO
=
0
VB( − 4 i − 3 j) + 1.0 k × (3 i − 4 j)
=
0
VB( − 4 i − 3 j) + (3 j + 4 i)
=
0
i: VB( − 4) + (4)
=
0
j: VB( − 3) + (3)
=
0
VB
=
1
VB
=
− 4 i − 3 j cm/s
In this calculation, the vector for the velocity of point B can be replaced by the magnitude since the direction is already known. Notice that the angular velocity of the body is multiplied by the position vector rBO. If the vector from rOB is used instead, the end result will give VB = − 1, indicating that the velocity is in the opposite direction. A quick look at Fig. 5↑ shows that this is impossible physically. Use of physics to confirm mathematical results (and vice versa) is a very helpful strategy to make a habit. The equation in line 3 has both i and j components. The equation in line 3 can be decomposed into two independent equations since i and j are orthogonal to one another. Solving both equations in lines 4 and 5 yield the same result that VB = 1. If they do not both give the same result, then there is a mistake in the mathematics. This is another good way to check a calculation for errors. The magnitude can be put together with the earlier direction to yield a final velocity vector for point B of VB = − 4 i − 3 j cm/s.
Now that the behavior of point B is known, the behavior of bar two and point A can be computed. Since point B is on bars two and three, and point A is on bars one and two, they can related through bar two:
VA
=
VB + ω2 × rBA
VA( − 3.26 i − 8.31 j)
=
( − 4 i − 3 j) + ω2 k × 6 j
VA( − 3.26 i − 8.31 j)
=
( − 4 − 6ω2) i − 3 j
Using the knowledge of the velocity of point A from Fig. 6↑, and the known velocity of point B, this equation has components in both i and j and two unknowns. Thus, this should be sufficient to compute the two unknown magnitudes.
The j component only has one unknown, which can be readily solved:
VA( − 8.3)
=
− 3
VA
=
0.361 cm/s
Using this result, the i component equation can also be solved:
VA( − 3.26)
=
( − 4 − 6ω2)
0.361( − 3.26)
=
( − 4 − 6ω2)
ω2
=
0.47 rad/s
Finally, these values can be used on bar one to determine its angular velocity. Let point "P" be the pivot for bar one:
VA
=
VP + ω1 × rPA
0.361( − 3.26 i − 8.31 j)
=
0 + ω1 k × (8.31 i − 3.26 j)
− 1.18 i − 3 j
=
ω1(8.31 j + 3.26 i)
i: − 1.18
=
ω13.26
j: − 3.00
=
ω18.31
ω1
=
0.361 rad/s
Once again, the third equation is actually two equations. Solution of either equation (another check) should provide the same answer for ω1 (within the errors introduced by round off).
← Previous Page
← Previous Page