|
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
TRANSLATIONAL AND ROTATIONAL VELOCITY
A rigid body can be considered as a collection of infinitesimal particles or elements subject to the constraint that the relative distance between each particle remains constant over time. These points move in unison to either translate or rotate. This leads to translational and rotational (angular) velocity of the body.
TRANSLATIONAL VELOCITY
If a body is translating without rotation in one frame of reference (see cross products/curl for an equation to determine rotation of a body or element), then the velocity can be computed as the rate of change or time derivative of the position vector:
(1) Vp = (dP)/(dt)
where P is the vector that describes the position of the point or body P with respect to a fixed origin.
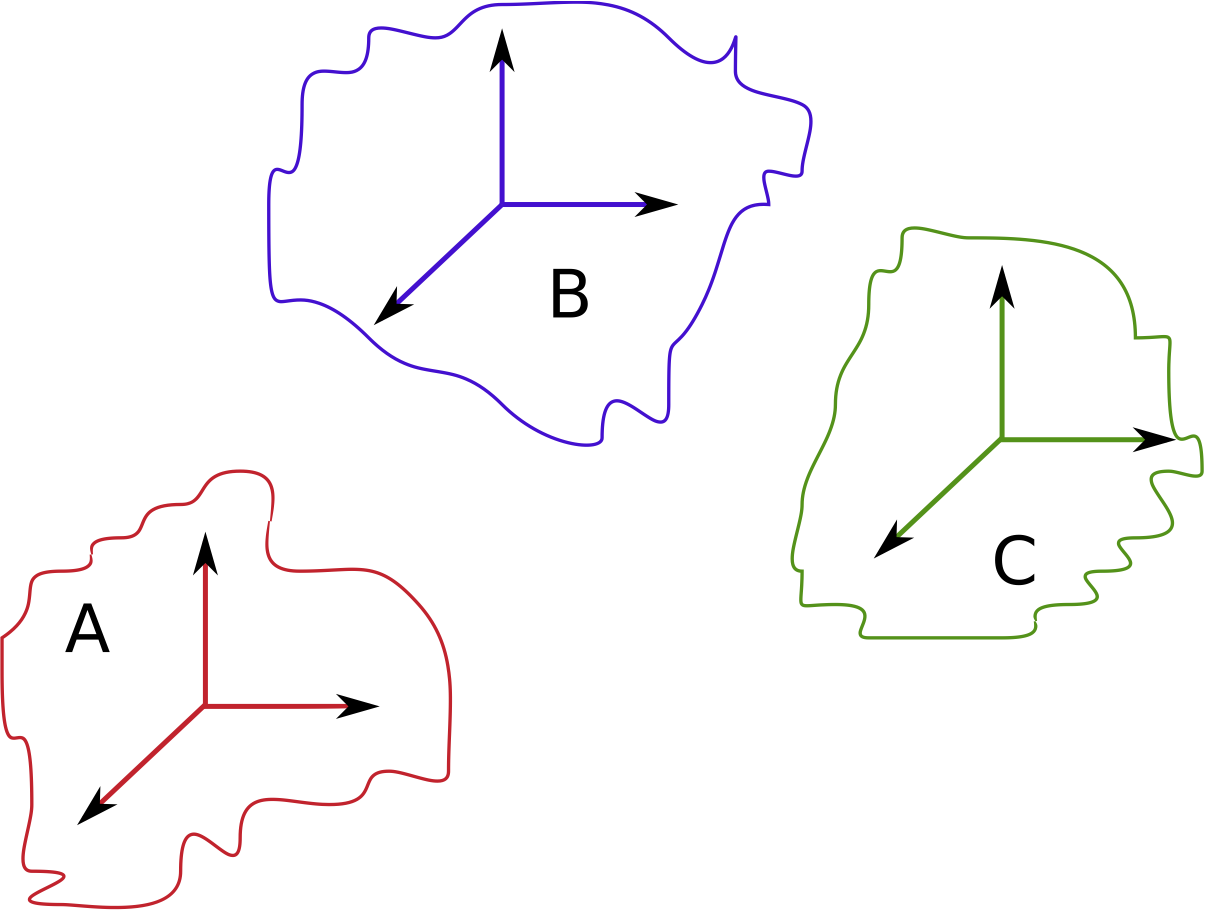
ANGULAR VELOCITY
Angular velocity defines the rotation of a rigid body or a frame of reference. Therefore, it is not correct to talk about angular velocity of a point. The angular velocity does not behave in a comparable manner as translational velocity, much in the same way that a moment varies from a force.
(2) ωA ⁄ C = ωA ⁄ B + ωB ⁄ C
The notation ωX ⁄ Y refers to the angular velocity of X with respect to Y. It is important to recognize that ωX ⁄ Y is a vector and can be expressed in any frame of reference, including X, Y or any other convenient frame of reference.