 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
CYLINDRICAL COORDINATE SYSTEM EXAMPLE
Example 1: Derivation
Derive, without inserting any values for r, θ, and z, the velocity v⃗P and acceleration a⃗P equations in cylindrical coordinates of point P from the position vector r⃗OP.
The position vector r⃗OP = rêr + Zk̂ can be written in terms of Cartesian coordinates: x = rcos(θ) and y = rsin(θ) to be
êr = cos(θ)î + sin(θ)ĵ
êθ = − sin(θ)î + cos(θ)ĵ
Differentiating r⃗OP gives
v⃗P = (dr⃗OP)/(dt) = r⃗̇ = ṙêr + rê̇r + Żk̂
Since e⃗r is relative to P and k̂ is fixed to P:
e⃗̇r = − θ̇sin(θ)î + θ̇cos(θ)ĵ = θ̇êθ
Replacing these unit definitions into the velocity equation gives the velocity:
(1) v⃗P = ṙêr + θ̇rêθ + Żk̂
To find the acceleration, differentiate again:
a⃗P = v⃗̇P = r̈êr + ṙê̇r + θ̈rêθ + θ̇ṙêθ + θ̇rê̇θ + Z̈k̂
Replacing the unit vector definitions and noting that ê̇θ = − θ̇cos(θ)î − θ̇sin(θ)ĵ = − θ̇êr, the acceleration can be written as
(2) a⃗P = (r̈ − rθ̇2)êr + (rθ̈ + 2ṙθ̇)êθ + Z̈k̂
Example 1: Application
A helicopter, ’B’, flies a helical pattern as shown in the figure. The vertical drop for each revolution (2π) as θ changes on the helix can be written as (pθ)/(2π).
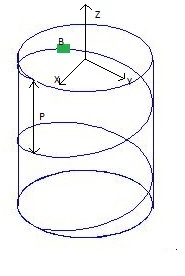
Determine the position, velocity and acceleration of point B in cylindrical coordinates. For the values R = 0.3m, p = 0.2m, and θ̇ = 0.6t(rad)/(s), find the values for the velocity and acceleration vectors of B when t = 10s.
Next Page →
Next Page →