 |
||||||||
 |
 |
 |
 |
|||||
 |
||||||||
 |
||||||||
 |
 |
|||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
 |
||||||||
MOVING FRAMES OF REFERENCE
There are worked problems in the Examples section. The principles of moving reference frames are applied in a number of problems worked in other sections within the Dynamics section.
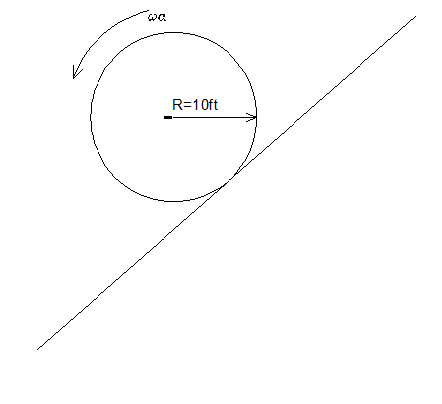
Example: Rolling cylinder
- a) Find the point in the plane where there is zero acceleration.
- b) Using only symbols and integration, compute the moment of inertia about the out of plane axis (z) axis at the point where the cylinder touches the inclined plane, if the density of the cylinder is ρ = ρ0⎛⎝1 − (r)/(2R)⎞⎠ and the length of the cylinder is T.
Solution
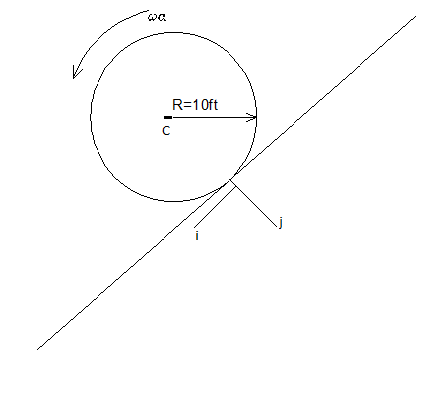
a) This problem can be solved using the two-dimensional acceleration equation
aQ = aP + θ̈k × rPQ − θ̇2rPQ
. The \blfree body diagram of the figure, along with the coordinate system, is shown in Fig. 2↓.
If the origin is set to O and substituting variables yields
a0 = aC + α × rCO − ω2rCO
aC = α × rIC = 3k × ( − 10j) = + 30i
Where C is the center of the cylinder, IC is the instantaneous center and rCO is the unknown direction vector to location of zero acceleration:
0 = aO
=
+ 30i + 3k × rCO − 4rCO
=
+ 30i + 3xj − 3yi − 4xi − 4yj
This equation can be decomposed into two equations, which can be solved simultaneously:
i:
+ 30 = 4x + 3y
× 4
120 = 16x + 12y
3x − 4y = 0
j:
0 = 3x − 4y
× 3
+ 0 = 9x − 12y
3⎛⎝(24)/(5)⎞⎠ − 4y = 0
120 = 25x, x = (24)/(5)
y = (18)/(5)
Next Page →
Next Page →